
Содержание
- Электродвигатели
- Конструкция электродвигателя
- Принцип работы электродвигателя
- Классификация электродвигателей
- Типы электродвигателей
- Специальные электродвигатели
- Основные параметры электродвигателя
- Сравнение характеристик внешне коммутируемых электрических двигателей
- Номинальные обороты двигателя
- Что такое номинальные обороты двигателя?
- Что такое номинальные обороты двигателя?
- 1. ГЕНЕРАТОРЫ И ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Что такое номинальные обороты двигателя?
Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является — электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор — неподвижная часть, ротор — вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




-
Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
- Универсальный
- Репульсионный
- КДПТ с обмоткой возбуждения
-
Включение обмотки
- Независимое
- Последовательное возбуждения
- Параллельное
- Комбинированное
- БДПТ
(Бесколлекторный двигатель + ЭП |+ ДПР) - ВРД
(Реактивный двигатель с ротором с явновыраженными полюсами и сосредоточенной обмоткой статора + ЭП |+ ДПР)
- Трехфазный
(многофазный)- АДКР
- АДФР
- Двухфазный
(конденсаторный) - Однофазный
- с пусковой обмоткой
- с экранированными полюсами
- с асимметричным магнитопроводом
- СДОВ
- СДПМ
- СДПМВ
- СДПМП
- Гибридный
- СРД
- Гистерезисный
- Индукторный
- Гибридный СРД-ПМ
- Реактивно-гистерезисный
- Шаговый 5
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].

Асинхронный электродвигатель

Cинхронный электродвигатель
Специальные электродвигатели

Серводвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
 ,
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин -1 [4]
Начальный пусковой момент — момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
Для вращательного движения
 ,
,
- где
 – угол, рад,
– угол, рад,
 ,
,
- где
 – углавая скорость, рад/с,
– углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
- где
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя, - P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (механическая), Вт
-
При этом потери в электродвигатели обусловлены:
- электрическими потерями — в виде тепла в результате нагрева проводников с током;
- магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
- где J – момент инерции, кг∙м 2 ,
- m — масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
- где
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2]
 ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где
 – постоянная времени, с
– постоянная времени, с
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.
Номинальные обороты двигателя
Введение
Тяговый расчет проектируемого трактора проводится с целью определения мощности двигателя, необходимой для получения расчетной силы тяги при различных рекомендуемых скоростях движения. С помощью тягового расчета делают выбор числа передач и наиболее рациональной разбивки передаточного отношения, обеспечивающих получение минимальной для данного типа и класса тракторов скорости, а также промежуточных и максимальных скоростей.
Основными этапами тягового расчета являются: определение силы тяги трактора по балансу мощностей и составление тяговой характеристики трактора, с помощью которой определяют возможности наиболее рационального его использования. Кроме того, рассматриваются вопросы, связанные с выбором основных параметров проектируемого трактора и структуры ряда передаточных чисел его трансмиссии.
Тяговый расчет трактора производится на основании данных задания.
Графическая часть работы включает в себя:
а) скоростную характеристику двигателя и лучевую диаграмму загрузки двигателя на передачах;
б) кинематическую схему трансмиссии трактора;
в) совмещенные потенциальную и тяговую характеристики трактора.
Анализ исходных данных
Назначение трактора
Слово «трактор» произошло от латинского слова «трако» – «тащу», «тяну». В этом и заключается главное назначение трактора: он или тащит на себе различные машины – орудия, или тянет их за собой. Но одно дело – тянуть легкую повозку по хорошо укатанной дороге и совсем другое – тянуть плуг по целине. Кроме того, трактор должен еще передавать энергию прицепленным к нему или навешенным на него машинам-орудиям (плугам, сеялкам, культиваторам) и уборочным машинам.
Трактор выполняет многочисленные виды работ в сельском и лесном хозяйстве, в промышленности и строительстве. Трактор-экскаватор, трактор-бульдозер, трактор-канавокопатель, трактор-погрузчик, трактор-тягач, трактор- трубоукладчик, лесосплавный трактор-амфибия это далеко не полный перечень существующих тракторов.
Больше всего тракторов в сельском хозяйстве, здесь они являются основой механизации производства.
Существуют сельскохозяйственные тракторы нескольких видов: тракторы общего назначения, используемые в соединении агрегата с прицепными и навесными машинами для пахоты, посева, культивации, уборки; универсально-пропашные, с помощью которых проводят междурядную обработку (рыхление, окучивание, опыливание, опрыскивание) и уборку картофеля, сахарной свеклы, подсолнечника и других пропашных культур; специальные, приспособленные для работы на крутых склонах, болотистых почвах, в садах, виноградниках, на плантациях хлопчатника.
Все эти тракторы не похожи один на другой по внешнему виду, развивают разную мощность, передвигаются с разной скоростью, соединяются с разными машинами. Но каждый из них обязательно состоит из одних и тех же основных частей: двигателя, силовой передачи (трансмиссии), ходовой части, рабочего оборудования и органов управления.
Трактора различного назначения представлены на рисунке 2.1.1
Вес трактора [Q]
Вес машины. В исходных данных указана масса трактора (кг), для расчета нам потребуется вес (Н).
 ,
,
где m – масса трактора,
g – ускорение свободного падения.



Рисунок 2.1 – Образцы тракторов различного назначения
Для гусеничного трактора сцепным весом является рабочий вес всего трактора, а для колесного – рабочий вес, приходящийся на ведущие колеса.
Коэффициент самоперекатывания [f]
Гусеничный трактор при сопротивлении перекатыванию должен учитывать возникающие потери в процессе трения элементов движителя и деформации грунта в связи с действием различных нагрузок от поверхности гусениц.
Внутренние потери обусловлены трением направляющих колес и различных катков в подшипниках, трением имеющихся звеньев гусениц, находящихся в шарнирах, а также биением самих гусениц. Учет данных потерь ведется коэффициентом, а компенсация происходит посредством подведения к гусеницам ведущего крутящего момента. Деформация грунта, возникающая во время угловых поворотов, и вертикальное прессование почвы вызывают внешние потери. Таким образом, нагрузка опорных катков передается на гусеницы и образуется колея.
Внешние потери учитываются также коэффициентом. Их компенсирует касательная сила тяги. Среди всех потерь именно внутренним потерям, возникающим в гусеничном движителе, отводится 60%. Именно поэтому необходимо создать требуемое натяжение гусениц с соблюдением всех правил техобслуживания. Потерям от вертикальной деформации почвы отводится лишь 20%, а от буксования гусениц итого меньше – 3%.
Коэффициент равен примерно 0,08…0,12 и 0,06…0,08 для гусеничного и колесного тракторов соответственно. Коэффициент самоперекатывания может меняться в значительных пределах 0,05…0,3 при нагрузках типа бульдозерных и на слабых грунтах.
Коэффициент сцепления [φкр max]
Величина, соответствующая коэффициенту трения скольжения колеса (трака гусеницы) по поверхности, т.е. при коэффициенте скольжения, равном единице. Обычно это понятие распространяют на все значения при коэффициентах скольжения от единицы до значения, соответствующего максимальному коэффициенту сцепления. Коэффициенты сцепления указаны в таблице 2.1.
Таблица 2.1 – Коэффициенты сцепления
Тип трансмиссии
Трансмиссия трактора, как правило, многопоточная, то есть передает мощность двигателя не только на ходовую часть, но и для привода агрегатируемых машин и вспомогательных механизмов.
Современные тракторы оборудуются трансмиссиями нескольких различных типов:
- Механические ступенчатые;
- Механические бесступенчатые;
- Гидромеханические;
- Гидрообъемные;
- Электрические и электромеханические.
При выполнении курсовой работы будут рассматриваться 2 вида трансмиссий – МСТ и ГМТ.
1) механические ступенчатые трансмиссии (МСТ). Механические ступенчатые трансмиссии имеют наименьшую стоимость и наиболее компактны при одинаковой величине передаваемой мощности, но не позволяют плавно регулировать скорость и тяговое усилие трактора. Механическая трансмиссия трактора состоит из главной фрикционной муфты сцепления, коробки передач, центральной (главной) передачи, конечных передач, передачи механизма отбора мощности. Дополнительно в механическую трансмиссию могут входить: увеличитель крутящего момента, ходоуменьшитель, редуктор-умножитель числа передач, раздаточная коробка. На гусеничных тракторах, кроме того, в состав трансмиссии входит механизм поворота.
2) гидромеханические трансмиссии (ГМТ) состоят из гидротрансформатора и механической ступенчатой коробки передач. Применение гидротрансформатора позволяет более полно использовать мощность двигателя в условиях переменной нагрузки на трактор и упрощает процесс управления им. Ступенчатая коробка передач позволяет выбирать нужный диапазон скоростей. В отличие от автомобилей, где гидромеханические трансмиссии обычно автоматические, на тракторах такая автоматизация не нужна и переключение передач осуществляется оператором. Изначально, гидромеханической трансмиссией оснащались тяжелые промышленные тракторы (например, Т-330 или Caterpilar), но в настоящее время, ею оснащаются практически все новые типы тракторов. Ступенчатые коробки передач могут быть как планетарными, так и обычного типа. К недостаткам таких трансмиссий относится низкий КПД и высокая сложность.
КПД трансмиссии
КПД трансмиссии представляет собой отношение мощности на ведущих звездочках трактора к мощности двигателя, передаваемой в трансмиссию.
Количество передач
Количество ступеней в КП.
Радиус ведущего колеса [Rвк]
Ведущие колеса служат для преобразования крутящего момента, подводимого к ним от двигателя, в касательную силу тяги, необходимую для передвижения трактора и буксирования прицепов. В целях обеспечения надежного сцепления ведущих колес с почвой на них передается большая часть (примерно 70…75 %) веса трактора. Размерность – метры.
Номинальные обороты двигателя
Обороты, при которых двигатель набирает максимальную мощность.
Что такое номинальные обороты двигателя?
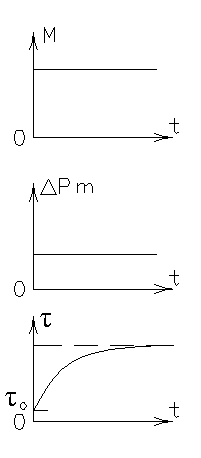
Рисунок 5.3 — Диаграммы полезного момента М, мощности тепловых потерь  и температуры двигателя τ при работе в режимеS1
и температуры двигателя τ при работе в режимеS1
S2 — Режим кратковременной нагрузки — работа при постоянной нагрузке в течение заданного времени, меньшего, чем требуется для получения теплового равновесия, с последующим отключенным неподвижным состоянием, имеющим достаточную продолжительность для достижения машиной температуры окружающей среды. Характеризующей величиной является продолжительность кратковременной работы. Определяются следующие значения продолжительности кратковременной работы: 10, 30, 60 и 90 мин. Соответствующие режиму S2 диаграммы показаны на рис. 5.4.

Рисунок 5.4 — Диаграммы М,  и τ при работе двигателя в режиме S2
и τ при работе двигателя в режиме S2
S3 — Режим повторно-кратковременной нагрузки — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов работы при постоянной нагрузке и отключенного неподвижного состояния; длительность этих периодов не достаточна для достижения теплового равновесия за время одного рабочего цикла, а наличие пускового тока существенно не влияет на нагрев. Соответствующие диаграммы показаны на рис. 5.5.
Для режима S3 характеризующей величиной является относительная продолжительность включения
 , (5.10)
, (5.10)
где  — период работы при номинальных условиях;
— период работы при номинальных условиях;  — период отключенного неподвижного состояния (паузы);
— период отключенного неподвижного состояния (паузы); — продолжительность цикла.
— продолжительность цикла.
Определяются следующие значения относительной продолжительности работы: 15, 25, 40 и 60 %. Продолжительность одного цикла, если нет других указаний, принимается равной 10 мин.

Рисунок 5.5 — Диаграммы М,  и τ при работе двигателя в режиме S3
и τ при работе двигателя в режиме S3
S4 — Режим повторно-кратковременной нагрузки, включая пуск, — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке и отключенного неподвижного состояния; длительность этих периодов недостаточна для достижения теплового равновесия за время рабочего цикла. Диаграммы, соответствующие этому режиму, показаны на рис. 5.6.
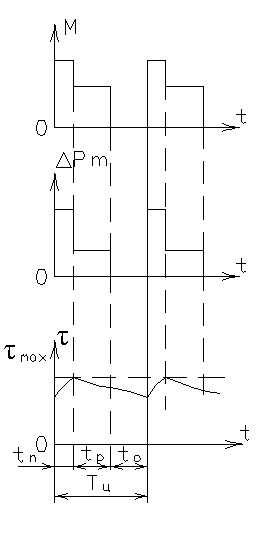
Рисунок 5.6 — Диаграммы М  и τ при работе двигателя в режиме S4
и τ при работе двигателя в режиме S4
S5 — Режим повторно-кратковременной нагрузки, включая электрическое торможение, — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке, быстрого электрического торможения и отключенного неподвижного состояния; длительность этих периодов недостаточна для достижения теплового равновесия за время одного цикла. Соответствующие этому режиму диаграммы показаны на рис. 5.7.

Рисунок 5.7 — Диаграммы М,  и τ при работе двигателя в режиме S5
и τ при работе двигателя в режиме S5
Для режимов работы S4 и S5 характеризующими величинами являются: относительная продолжительность включения, число включений в час, коэффициент инерции и постоянная кинетической энергии.
Под относительной продолжительностью включения понимается для режима S4
 , (5.11)
, (5.11)
 , (5.12)
, (5.12)
где, кроме известных величин,  и
и  — периоды соответственно пуска и торможения.
— периоды соответственно пуска и торможения.
Продолжительность цикла, с, находится по формуле
 , (5.13)
, (5.13)
где  — число включений (циклов) в час.
— число включений (циклов) в час.
Под коэффициентом инерции понимается отношение суммы момента инерции двигателя и приведенного к валу двигателя момента инерции механизма к моменту инерции двигателя
 . (5.14)
. (5.14)
Постоянная кинетической энергии — отношение кинетической энергии, запасенной ротором при номинальной частоте вращения (угловой скорости), к номинальной полной мощности или произведению номинальных напряжения и тока в машинах постоянного тока.
Для режимов работы S4 и S5 определяются следующие значения величин: ПВ= 15, 25, 40 и 60 %; z= 30, 60, 90, 120, 180, 240 и 360 вкл./ч;  — 1,2; 1,6; 2; 2,5 и 4.
— 1,2; 1,6; 2; 2,5 и 4.
S6 — Режим продолжительной работы при переменной нагрузке — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов работы при постоянной нагрузке и на холостом ходу; длительность этих периодов недостаточна для достижения теплового равновесия за время одного рабочего цикла. Соответствующие диаграммы приведены на рис. 5.8.
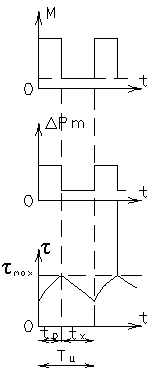
Рисунок 5.8 — Диаграммы M,  и τ при работе двигателя в режимеS6
и τ при работе двигателя в режимеS6
Характеризующей величиной является продолжительность работы
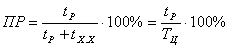 , (5.15)
, (5.15)
где  — период работы на холостом ходу механизма.
— период работы на холостом ходу механизма.
Определяются следующие значения ПР = 15, 25, 40 и 60 %. Продолжительность одного цикла, если нет других указаний, принимается равной 10 мин.
S7 — Режим продолжительной нагрузки, включая электрическое торможение, — последовательность идентичных рабочих циклов, каждый из которых состоит из периодов пуска, работы при постоянной нагрузке и электрического торможения; длительность рабочего периода недостаточна для достижения теплового равновесия за время одного цикла.
Диаграммы, соответствующие этому режиму, показаны на рис. 5.9.
Для режима работы S7 характеризующими величинами являются: число включений в час, коэффициент инерции и постоянная кинетической энергии. Определяются следующие значения величин: z — 30, 60, 90, 120, 180, 240 и 360 вкл./ч;  = 1,2; 1,6; 2; 2,5; 4.
= 1,2; 1,6; 2; 2,5; 4.
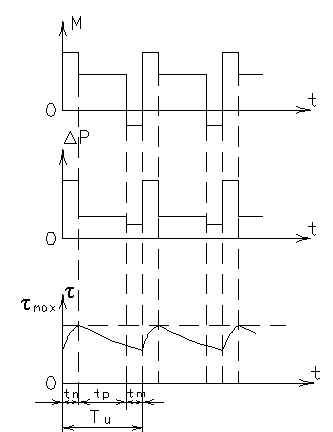
Рисунок 5.9 — Диаграммы M,  и τ при работе двигателя в режиме S7
и τ при работе двигателя в режиме S7
S8 — Режим работы при периодическом изменении частоты вращения и нагрузки —
последовательность идентичных рабочих циклов, каждый из которых состоит из периодов ускорения, работы при постоянной нагрузке, соответствующей заданной частоте вращения, затем одного или нескольких периодов работы при других постоянных значениях нагрузки, соответствующих другим частотам вращения; длительность каждого рабочего периода недостаточна для достижения теплового равновесия за время одного рабочего цикла. Соответствующие данному режиму диаграммы для случая трех периодов частоты вращения показаны на рис. 5.10.
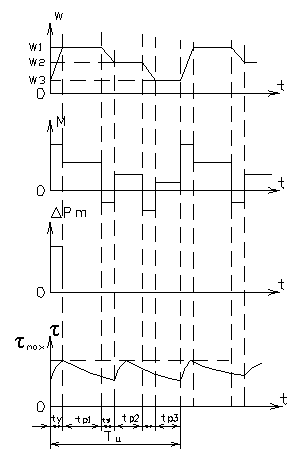
Рисунок 5.10 — Диаграммы  ,М,
,М,  и
и  при работе двигателя в режимеS8
при работе двигателя в режимеS8
Для режима работы S8 характеризующими величинами являются число включений в час, относительная продолжительность работы (ПР) для каждой внешней нагрузки и соответствующей ей частоты вращения, а также коэффициент инерции и постоянная кинетической энергии. Относительная продолжительность работы в данном случае для каждой из нагрузок определяется по формуле
 , (5.16)
, (5.16)
где  — период работы при постоянной1-й нагрузке;
— период работы при постоянной1-й нагрузке;  — период переходного процесса (ускорения или замедления) при переходеj-му значению частоты вращения (угловой скорости) и соответствующей ей нагрузке.
— период переходного процесса (ускорения или замедления) при переходеj-му значению частоты вращения (угловой скорости) и соответствующей ей нагрузке.
Например, для диаграммы рис. 5.10:
 ;
;
 ;
;  .
.
Для режима работы S8 определяются следующие значения величин: z = 30, 60, 90, 120, 180, 240 и 360 вкл./ч;  = 1,2; 1,6; 2; 2,5; 4; ПР= 15, 25, 40 и 60%.
= 1,2; 1,6; 2; 2,5; 4; ПР= 15, 25, 40 и 60%.
В каталогах на электрические машины приводятся данные для номинальных режимов S1, S2 и S3. Задача выбора электрической машины по мощности заключается в том, чтобы правильно сопоставить ее рабочий режим с номинальным, обеспечив максимальное использование выбранного двигателя по условиям нагрева.
Что такое номинальные обороты двигателя?
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
МАШИНЫ ЭЛЕКТРИЧЕСКИЕ
НОМИНАЛЬНЫЕ ЧАСТОТЫ ВРАЩЕНИЯ И ДОПУСКАЕМЫЕ ОТКЛОНЕНИЯ
Electrical machines.
Rated speeds of rotation and tolerances
Срок действия с 01.07.74
до 01.07.79*
_______________________________
* Ограничение срока действия снято
постановлением Госстандарта СССР от 15.12.83 N 5954.
(ИУС N 3, 1984 год). — Примечание «КОДЕКС».
ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета стандартов Совета Министров СССР от 30 июля 1973 г. N 1867
ПЕРЕИЗДАНИЕ. Ноябрь 1974 г.
Настоящий стандарт распространяется на электрические машины всех видов и устанавливает номинальные частоты вращения и допускаемые отклонения номинальной частоты вращения электрических машин независимо от областей их применения.
Стандарт не распространяется на электрические машины наземного, водного и воздушного транспорта с приводом, работающим с переменными частотами вращения, двигатели гребных винтов, генераторы для взрывных работ, велогенераторы, сельсины, шаговые и импульсные двигатели, стартеры, стартер-генераторы, гидрогенераторы мощностью свыше 10000 кВт, двигатели, применяемые в приводах электрической централизации стрелок и сигналов железнодорожного транспорта, двигатели с дуговым статором, двигатели гироскопов, фототелеграфной и другой аппаратуры документальной связи, применяемые в системах автономной синхронизации, двигатели погружных насосов, тяговые двигатели, электробуры и двигатели со встроенным редуктором.
Стандарт соответствует рекомендациям СЭВ по стандартизации PC 780-66 и PC 655-66.
1. ГЕНЕРАТОРЫ И ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
1. ГЕНЕРАТОРЫ И ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
1.1. Номинальные частоты вращения генераторов и двигателей постоянного тока должны соответствовать указанным в табл.1.
Номинальная частота вращения, об/мин
_________________
Знак «X» означает допустимость изготовления, знак «-» — недопустимость изготовления.
1. В технически обоснованных случаях допускается номинальная частота вращения 375 об/мин для генераторов постоянного тока мощностью свыше 100 кВт.
2. Допускается номинальная частота вращения 24000 об/мин для двигателей постоянного тока, входящих в состав электромашинных преобразователей.
1.2. Номинальные частоты вращения генераторов постоянного тока, когда их приводными двигателями являются асинхронные двигатели, должны быть меньше указанных в табл.1 на частоту вращения, определяемую величиной номинального скольжения приходного двигателя.
1.3. Номинальные частоты вращения двигателей постоянного тока, когда эти двигатели работают при напряжении питания, изменяющемся в диапазоне 22 . . . 29, 95 . . . 170 или 175 . . . 320 В, относятся к работе двигателей при соответствующем номинальном напряжении по ГОСТ 721-74*.
_________________
* Взамен действует ГОСТ 721-77. — Примечание «КОДЕКС».
1.4. Номинальные частоты вращения двигателей постоянного тока мощностью до 110 кВт, предназначенных для работы в электроприводе механизмов металлургических агрегатов, на кранах и других подъемно-транспортных механизмах, должны соответствовать ГОСТ 184-71.
1.5. Номинальные частоты вращения двигателей постоянного тока мощностью 110 кВт и выше, предназначенных для привода шахтного подъема, прокатных станов и других механизмов, требующих широкого регулирования частоты вращения, должны быть следующие: 16; 20; 25; (28); 32; (36); 40; (45); 50; (56); 63; (71); 80; (90); 100; 125; 160; 200; 250; 315; 400; 500; 630; 800; 1000; 1250 об/мин.
Примечание: Номинальные частоты вращения, заключенные в скобки, применять не рекомендуется.
1.6. Наименьшие частоты вращения двигателей постоянного тока с регулированием числа оборотов изменением поля главных полюсов и наибольшие частоты вращения двигателей с регулированием числа оборотов изменением напряжения на якоре при номинальном напряжении и номинальной нагрузке на валу должны соответствовать указанным в табл.1 и п.1.5.
1.7. Номинальные частоты вращения малогабаритных автотракторных двигателей постоянного тока мощностью до 0,075 кВт должны соответствовать ГОСТ 9443-67.
1.8. Допускаемые отклонения номинальной частоты вращения двигателей постоянного тока (при номинальной нагрузке и рабочей температуре отдельных частей) должны соответствовать указанным в табл.2.













